What is Industrial Automation?
INTRODUCTION AND BASIC CONCEPT OF INDUSTRIAL AUTOMATION
Industrial automation Books
- INDUSTRIAL AUTOMATION – ELECTIVE – For Diploma in Electronics & Telecommunication
- Elements of Industrial Automation For Diploma Electrical Engineering
What is Automation?
Automation refers to a technology which based on the usage of mechanical, electronic and computer system in handling process and manufacturing process control.
The usage of automation technology started when work done by labor / worker was started replace by machine.
The technology development process continuously improves until humans started to introduce the usage of robotics, CAD/CAM, Flexible manufacturing systems and others technology to increase human quality of life and increase productivity in the industrial.
Industry : Systematic Economic Activity that could be related to Manufacture/Service/ Trade.
The word ‘Automation’ is derived from greek words “Auto”(self) and “Matos” (moving). Automation therefore is the mechanism for systems that “move by itself”.
automated systems also achieve significantly superior performance than what is possible with manual systems, in terms of power, precision and speed of operation.
Automation is a set of technologies that results in operation of machines and systems without significant human intervention and achieves performance superior to manual operation
Advantages for Automation
- To increase labor productivity. Automating a manufacturing operation usually increases production rate and labor productivity. This means greater output per hour of labor input.
- To reduce labor costs. Ever-increasing tabor cost has been and continues to be the trend in the world’s industrialized societies. Consequently, higher investment in automation has become economically justifiable to replace manual operations. Machines are increasingly being substituted for human lahar to reduce unit product cost.
- To migrate the effects of labor shortages. There is a general shortage of labor in many advanced nations and this has stimulated the development of automated operations as a substitute tor labor.
- To reduce or eliminate routine manual and clerical tasks.
- To improve worker safety. By automating a given operation and transferring the worker from active participation in the process to a supervisory role, the work is made safer.
- To improve product quality.
- To reduce manufacturing lead lime. Automation helps to reduce the elapsed time between customer order and product delivery..
- To accomplish processes that cannot be done manually. Certain operations cannot be accomplished without the aid of a machine. These processes have requirements for precision, miniaturization or complexity of geometry that cannot be achieved manually.
Examples : certain integrated circuit fabrication operations, rapid prototyping processes based on computer graphics (CAD) models, and the machining of complex, mathematically defined surfaces using computer numerical control. These processes can only be realized by computer controlled systems. - To avoid the high cost of not automating. There is a significant competitive advantage gained in automating a manufacturing plant.
Disadvantages of Automation
- Higher Start-up cost and the cost of operation.
- Higher Cost of Maintenance
- Obsolescence/Depreciation Cost : Obsolescence and depreciation is a gradual reduction in the value of physical assets
- Unemployment
- Not economically justifiable for small scale production
Types of Automation Systems
Automated manufacturing systems can be classified into three basic types:
i. Fixed automation.
ii. Programmable automation, and
iii. Flexible automation.
Industrial Automation and Robotic
Robotic is the main component in the industrial automation.
Industrial work situations that promote the substitution of robots for human labor include: hazardous work environments; repetitive work cycles; difficult handling; multi-shift environments; infrequent changeovers; and part position and orientation are established in the work cell i.e. repetitive tasks.
Robots are being used mainly in three types of applications: material handling; processing operations; and assembly and inspection.
In material handling robots move parts between various locations by means of a gripper type end effector.
Two sub-divisions may be noted in material handling: material transfer; and machine loading and/or unloading

Basic Concept of Automation Terminology
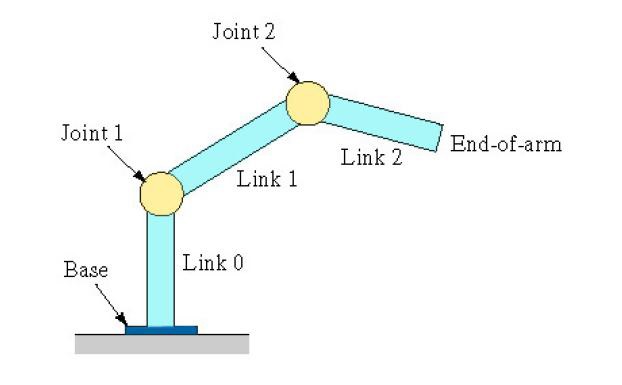
Links and Joints
Links are the solid structural members of a robot, and joints are the movable couplings between them.
Joints or axes found in the manipulator (robotic arm).
A joint of an industrial robot is similar to a joint in the human body. It provides relative motion between two parts of the body.
Joints consists of two types, major axis comprising the base, shoulder and elbow and minor axis comprising wrist pitch, wrist roll and wrist yaw.
Connected to each joint are two links (Figure 1.11), an input link and an output link. Links are the rigid components of the robot manipulator. The purpose of the joint is to provide controlled relative movement between the input link and the output link
- RRB JE CBT 2 Exam Date 2025 Postponed|RRB JE CBT 2 Exam Date

- [PDF]RRB JE Result 03/2024 Cut off, Selected no of candidates for all regions
- [PDF]Final Answer Key Junior Instructor Mechanic Agricultural Machinery|643/2023 Solved Question paper
- Acoustics MCQs|Industries Extension officer|IEO 2025
- LASER MCQs| Industries Extension officer|IEO 2025
- Practical Types of Capacitors
- [PDF] Syllabus JUNIOR INSTRUCTOR MECHANIC AGRICULTURAL MACHINERY|643/2023 Syllabus Kerala PSC
- [PDF] Syllabus JUNIOR INSTRUCTOR WOOD WORK TECHNICIAN|674/2023 Syllabus Kerala PSC
- [PDF] Syllabus JUNIOR INSTRUCTOR MECHANIC CONSUMER ELECTRONIC APPLIANCES|670/2023 Syllabus Kerala PSC
- [PDF] Junior Instructor Hospital Housekeeping| 646/2023 syllabus Kerala PSC
- [PDF] Syllabus Workshop Instructor Tool and Die|242/2023 syllabus Kerala PSC
- [PDF]Junior Instructor Technician Mechatronics Syllabus|654/2023 syllabus Kerala PSC